SLAMの利用条件
このページでは、グラスのSLAMの利用条件について紹介します。
利用可能範囲
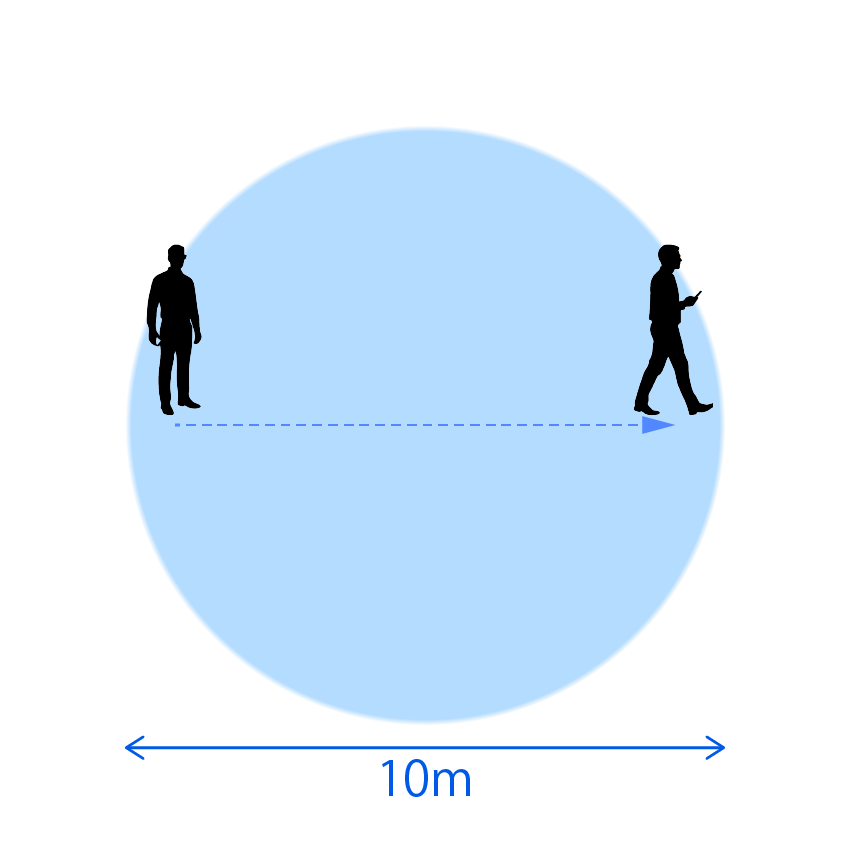
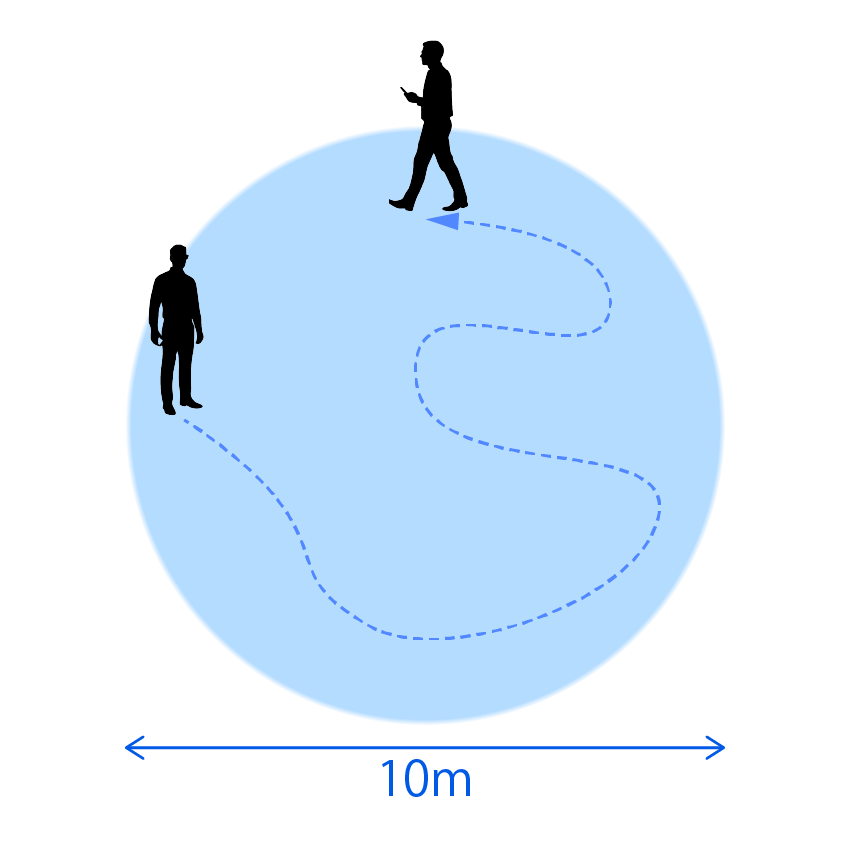
- MiRZAを起動した位置を基準に直径10m範囲の空間でのご利用を推奨します。
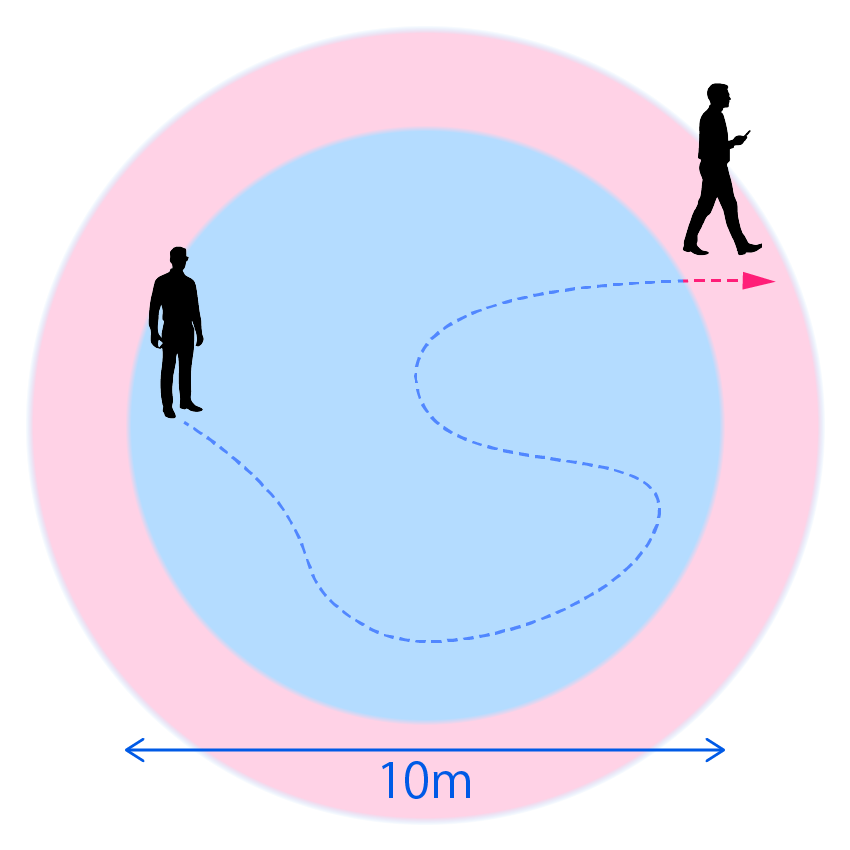
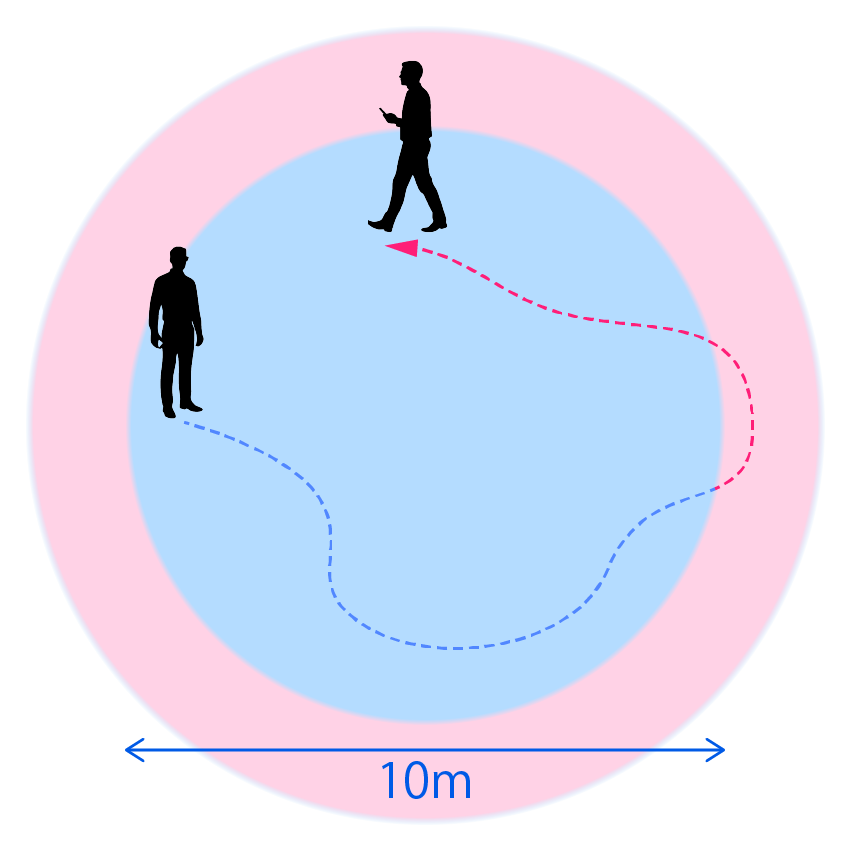
直径10m範囲を超えて利用した場合、MiRZAの自己位置推定が大きな誤差が発生する可能性があります。
ヒント
- 直径10m範囲の空間を超えるユースケースの場合、AnchorやVPS(Visual Positioning System)などの機能を使用してください。
直径10m範囲の空間での使用
直径10m範囲を超えた空間での使用
環境評価方法
利用環境がSLAMの動作要件を満たしているかについては、VPSを利用する環境の評価方法に基づき確認してください。
推奨環境
MiRZAの6dof精度/自己位置推定�精度を最大限発揮させる場合は、以下の点に注意してご利用ください。
1.コーナーやエッジなどの特徴点を数多く捉えて利用すること
2.特徴点が空間内に広く分布されていること
良い環境 (例) 空間内に物が多い、壁にポスターが張られている



悪い環境 (例) 真っ白な部屋、床や壁に光沢がある部屋、壁に特徴点が少ない部屋



3.特徴点が認識できる明るさ(100lux以上)が確保されていること
悪い環境 (例) 霧/煙による視界不良、明るさが不十分、明暗差が激しい



4.特徴点が動いていないこと
悪い環境 (例) 車の中、人混みの中、鏡がある部屋



5.特徴点が繰り返しパターン(同じ模様など)になっていないこと
悪い環境 (例) 同形状の繰り返し

